Wir haben den Begriff der Geradenkreuzung über ein ungeordnetes Paar {g, h} [Typ 1] und ein geordnetes Paar (g, h) [Typ 2] von Geraden eingeführt.
Analog dazu müssen wir unterscheiden zwischen einem ungeordneten Paar {s, t} [Typ 3] und einem geordneten Paar (s, t) [Typ 4] von Strahlen, an dem wir den Begriff des Winkels untersuchen wollen. Da wir den Begriff der Winkelhalbierenden in vorangegangenen Vorlesungen an einem Paar des Typs 2 untersucht haben, liegt es nahe, ein Paar des Typs 4 für unsere Betrachtungen heranzuziehen.
Definition:
Gegeben sei eine affine Ebene A mit den Axiomen (F) und
(D). Der [dadurch schon gegebene] Koordinatenkörper sei angeordnet.
Dann ist ein Strahl mit Anfangspunkt S eine Menge {X
Î
P | X ³
0} nach Wahl des Nullpunktes
0 := S und eines Einspunktes
E
¹0.
[Der Strahl liegt auf 0E.]
Damit ist der Begriff Winkel für ein Paar des Typs 4 klar und die Definition des Begriffes Winkelhalbierende erfolgt analog zur Definition bezüglich Typ 2.
Definition:
Gegeben sei eine affine Ebene A mit den Axiomen (F) und
(D). Der [dadurch schon gegebene] Koordinatenkörper sei angeordnet.
Weiter sei Orthogonalität gegeben mit den Axiomen (O1)
bis (O4) und die transitive Relation "abstandsgleich".
Eine Winkelhalbierende eines Winkels (S, (s, t))
ist ein Strahl w mit Anfangspunkt S, so daß bei der
Spiegelung an der Geraden w È w'
[w' ist der Gegenstrahl zu w.] s auf t abgebildet
wird.
Satz:
Es gibt bei vorausgesetztem Axiom (W) genau zwei Winkelhalbierende
w
und w'. [w' ist der Gegenstrahl zu w.]
Um den Schnittpunkt der Winkelhalbierenden in einem Dreick untersuchen
zu können, müssen wir also zunächst das Innere eines
Dreiecks definieren.
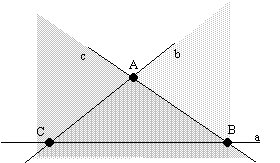
Dieses gelingt über die Betrachtung von "Halbebenen", die durch
Geraden in einer Ebene entstehen.
Die Gerade b teilt die Ebene in zwei Halbebenen, von denen diejenige für unsere Betrachtung relevant ist, in der der Punkt B liegt. Analog gilt dieses für die beiden anderen Geraden c und a [letzteres hier nicht eingezeichnet].
Definition:
Gegeben sei eine affine Ebene A mit den Axiomen (F) und
(D). Der [dadurch schon gegebene] Koordinatenkörper sei angeordnet.
Dann ist die Strecke![]() die Menge {X I PQ | P £X£
Q} nach Wahl von 0
:=
P und E := Q.
die Menge {X I PQ | P £X£
Q} nach Wahl von 0
:=
P und E := Q.
[Anders: Die Strecke ![]() ist die Schnittmenge der Strahlen
ist die Schnittmenge der Strahlen ![]() und
und ![]() .]
.]
Definition:
g sei eine Gerade, P und Q Punkte in der affinen
Ebene. Auf P \ P(g) gilt P![]() Q
[P und Q liegen in der selben Halbenbene bezüglich
g]
genau dann, wenn die Schnittmenge von der Strecke
Q
[P und Q liegen in der selben Halbenbene bezüglich
g]
genau dann, wenn die Schnittmenge von der Strecke ![]() und
der Menge P(g) leer ist.
und
der Menge P(g) leer ist.
Satz:
![]() ist eine
Äquivalenzrelation, und es gibt genau zwei Äquivalenzklassen,
nämlich die beiden Halbebenen von g.
ist eine
Äquivalenzrelation, und es gibt genau zwei Äquivalenzklassen,
nämlich die beiden Halbebenen von g.
Mit Hilfe dieser Definitionen lassen sich über das Innere eines
Dreieckes auch die inneren Winkelhalbierenden eines Dreiecks definieren.
Um den Begriff des Winkelmaßes zu erschließen, betrachten wir zunächst den Begriff der Winkelgleichheit.
Definition:
Als Bewegungsgruppe B der affinen Ebene mit Orthogonalität
(A, ^) bezeichnen wir das Erzeugnis
der Spiegelungen an beliebigen Geraden der affinen Ebene:
B:= <s | s
Spiegelung>.
Definition:
Zwei Winkel (s, t) und (s', t') heißen
kongruent
["gleich
groß"], wenn es eine Bewegung b Î
B gibt mit (s b,
t b) = (s', t').
Der Begriff der Kongruenz von Figuren [als Mengen von Punkten] läßt
sich analog definieren.
Wir haben in vorausgegangenen Vorlesungen schon Hintereinanderausführungen von Bewegungen untersucht und festgestellt, daß das Produkt zweier Spiegelungen an zwei parallelen Geraden eine Translation ist. Wir untersuchen nun andere Hintereinanderausführungen.
Für die Drehung ergibt sich die folgende Definition.
Definition:
Eine Drehung um einen Punkt P ist das Produkt einer geraden
Anzahl von Spiegelungen an Geraden durch den Punkt P.
Die Drehungen um einen Punkt P bilden die Gruppe DP.
1. Dreispiegelungssatz:
Ein Produkt von drei Spiegelungen an Geraden durch P ist eine
Spiegelung.
Definition:
B+ ist die Gruppe, deren Elemente Produkte einer
geraden Anzahl von Spiegelungen an beliebigen Geraden sind. Die Elemente
heißen "eigentliche Bewegungen".
Die Translationen der affinen Ebene sowie die Drehungen an beliebigen Punkten bilden Untergruppen von B+.
Satz:
Die Gruppe der eigentlichen Bewegungen ist das Produkt der Translationsgruppe mit
einer Drehgruppe DP.
Definition:
Figuren F und F' (insbesondere Winkel) heißen gleichsinnig
kongruent, wenn es eine eigentliche Bewegung b
Î B+ gibt mit Fb
= F'.
Die Gruppe der Drehungen ist relevant bei der Betrachtung von Winkelmaßen.
Wir betrachten den sogenannten Einheitskreis, den wir mit Hilfe eines
Strahls mit Anfangspunkt S und einem Einspunkt E auf dem
Strahl durch Spiegelungen an Geraden durch den Mittelpunkt S des
Kreises konstruieren können.
Jedem Punkt P auf dem Kreis kann man die (eindeutig bestimmte) Drehung
d
um den Punkt S zuordnen, welche E auf P abbildet. [Wir betrachten
nur das Ergebnis der Drehung, nicht den Vorgang.]
Satz:
Es gibt genau eine Drehung um S, die E auf einen Kreispunkt P abbildet.
Unsere Betrachtungen haben sich damit von der Menge der Punkte auf die Gruppe der Drehungen verlagert. Mit Hilfe der Gruppe DS können wir die Menge K der Punkte des Kreises zu einer (additiven) Gruppe machen: (K, +, E) @ (DS, *, id).
Satz:
Die Gruppe der Drehungen um einen beliebigen Punkt S ist kommutativ.
Nach dem Isomorphiesatz gilt DS @
B+/T(A) =: W.
W ist damit eine von S unabhängige Winkelmaßgruppe.
Die trigonometrischen Funktionen auf W definiert man wie in der Schule üblich über DS und den zugehörigen Einheitskreis K in einem Orthogonal-Koordinatensystem, dessen eine Aches SE ist. So erhält man im Euklidischen Fall die Funktionen sin, cos, im Minkowskischen Fall die entsprechenden hyperbolischen Funktionen.
Im Euklidischen Fall führt man noch Gruppenhomomorphismen von (R, +, 0) auf W ein (sog. Überlagerungen) und erhält bezüglich p normierte Gradeinteilungen, wobei p die kleinste positive reelle Zahl p ist, die auf das Maß des gestreckten Winkels abgebildet wird. Im Minkowskischen Fall bildet man (R, +, 0) auf eine Zusammenhangskomponente des Minkowskikreises (einen "Hyperbelast") und die entsprechende Untergruppe der Drehgruppe ab. Dies liefert schließlich trigonometrische Funktionen auf R.
Zurück zur Übungsstunde vom 14.02.01 und zum 12.02.01.